pour le 2 eme qui est a peu pres identique a celui que j utilise
TACHYMETRE LCD - Mesure de la vitesse de 100 à 25000 trs/mn
Pour répondre à trois questions souvent posées, je ne fabrique ni ne modifie ni ne chiffre mes montages à la demande.
Le programme pour le microcontrôleur est conçu à partir d'un basic Digimok.
Le source en Basic est fourni et commenté.
Aucun synoptique, algorithme ... ne seront proposés.
C'est un tachymètre architecturé autour d'un PIC 16F84. L'affichage est réalisé par un afficheur LCD.
L'excursion de la vitesse de rotation mesurée s'étage de 100 à 25000 trs/mn.
Description du fonctionnement :
Ce tachymètre a été conçu à l'origine pour mesurer la vitesse de rotation de moteurs électriques alimentés en continu ou en alternatif (mono ou triphasé). Le PIC 16F84 mesure la période de rotation du moteur. Il calcule ensuite sa vitesse de rotation puis l'affiche. L'avantage de ce système de mesure est que l'affichage est rafraîchi toutes les 2 secondes, et ceci indépendamment de la vitesse de rotation.
Si la vitesse est inférieure à 100 trs/mn, l'afficheur indique <<<<<, si la vitesse est supérieure à 25000 trs/mn, l'afficheur indique >>>>>.
Le capteur peut être de différentes technologies. Il doit fournir un signal logique 0/5V avec un rapport cyclique autour de 0.5 (valeur non critique à la précision de l'appareil). L'entrée capteur est protégée par un écrêteur ( les diodes sont internes au PIC ) ce qui évitera à certains imprudents de flamber le microcontrôleur.
La précision de la mesure est de 1% pour la gamme des vitesses allant de 100 à 1000 trs/mn et de 1‰ pour la gamme des vitesses allant de 1000 à 25000 trs/mn. Pour une vittesse de rotation supérieure à 10 000 trs/mn, les deux derniers chiffres n'ont guère de signification.
Le programme est conçu à partir d'un vieux Basic Digimok qui ne possède pas de librairie mathématique. Les méthodes de calcul sont donc particulières et difficilement compréhensibles. Les commentaires résument le but de chaque opération.
Lors de la mise sous tension, l'affichage indique V = 000 tr/mn. En cas d'arrêt de la rotation, l'affichage reste figé sur la dernière mesure..
On peut tester le tachymètre sans le capteur en court-circuitant rapidement plusieurs fois les deux picots XC et X0.
Pour réaliser de projet vous aurez besoin :
schéma structurel du Tachymètre
typon du Tachymètre
schéma d'implantation des composants
Listing du programme en Basic Digimok
Fichiers pour flasher le PIC, clic droit et enregistrer-sous,
programme du PIC 16F84, pour un quartz de 8,192 MHz
programme du PIC 16F84, pour un quartz de 8 MHz
programme du PIC 16F628, pour un quartz de 8 Mhz
Nomenclature :
Résistance
Ajustable
Condensateur
Circuit Intégré
Quartz
Diode
Afficheur
Barrette tulipe
Entretoise
Vis
Conducteur 0.22mm²
R3
R4
R5
R2
C1, C2
C3, C5
C4, C7
C6
C8
U1
U2
Q1
D1
A1
A1
M 3 x 10mm
M 2,5 x 10mm
M 3 x 6mm
M 2,5 x 6mm
X5, XC, X0
X9, X0B
100 k
10 k
220
22 k
22 pF Céramique
10 µF Tantale
100 µF 16V
100 nF CMS 1206
100 nF
16F84 20MHz + support
7805 + vis - écrou
8.192 MHz ou 8 MHz
1N 4002
Compatible 44780
14 broches
4
8
4
4
3 pour capteur
2 pour l'alimentation
Force l'entrée du PIC à 5V lorsque le capteur n'est pas connecté
Reset avec C3
Protection
Réglage du contraste de l'afficheur
Oscillateur du PIC avec le quartz
C5, découplage de l'alimentation du PIC
Découplage du régulateur
Découplage de l'alimentation du PIC
Découplage de l'alimentation du PIC
Gestion du capteur et de l'afficheur ( ou 16F628 )
Régulation de tension à 5V
Cadençage de l'horloge
Protection contre les inversions de polarité
Affichage de la vittesse
Connexion de l'afficheur
Pour fixation de la carte
Pour fixation de l'afficheur
La fabrication :
La fabrication ne pose pas de problèmes particuliers.
Le régulateur 7805 n'a pas besoin de radiateur.
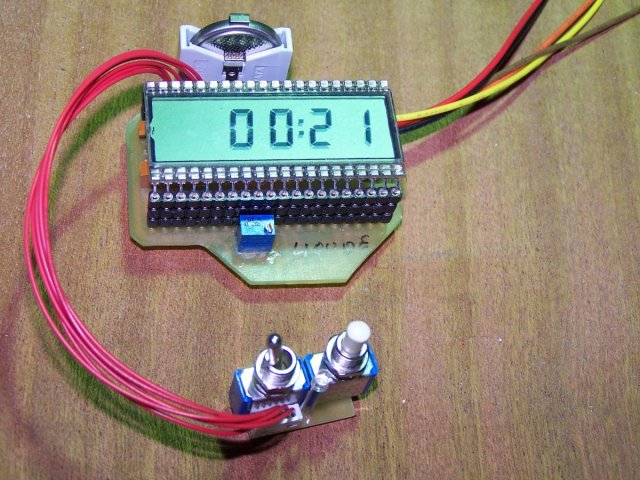
L'afficheur est implanté avec la procédure suivante :
- câbler le support tulipe,
- visser l'afficheur sur ses quatre entretoises,
- insérer une queue de résistance dans chacunes des broches,
- les souder sur l'afficheur et les couper.
Le résultat est montré avec la photo ci-contre.
L'afficheur est débrochable.
Le PIC doit être obligatoirement une version 20 MHz.
L'implantation du quartz est prévue pour 2 boîtiers différents.
Les condensateurs situés sous l'afficheur font moins de 10 mm de hauteur.
Pour tout problème d'approvisionnement en composants, vous pouvez vous adresser à la société ELECTROME de Pau, le lien est sur la page de d'accueil.
Le capteur :
Un exemple de capteur utilisable avec ce tachymètre si les deux objets ne sont pas éloignés de plus de quelques dizaines de centimètres.
Il faudra remplacer C2 qui est à l'origine un 10 nF par un 2,2 nF.
Capteur
le 1 er moins bien
TACHYMETRE
Pour répondre à trois questions souvent posées, je ne fabrique ni ne modifie ni ne chiffre mes montages à la demande.
La fréquence de 8,192 MHz du quartz est impérative. C'est une puissance de 2.
Si vous ne pouvez pas vous le procurer, ce n'est pas la peine d'envisager cette fabrication.
Le programme pour le microcontrôleur est conçu à partir d'un basic Digimok.
Le source est fourni et commenté. La partie assembleur est donc difficilement compréhensible.
Aucun synoptique, algorithme ... ne seront proposés.
C'est un tachymètre architecturé autour d'un PIC 16F84. L'affichage est réalisé par 4 afficheurs 7 segments.
Le changement de gamme est automatique.
L'excursion de la vitesse de rotation mesurée s'étage de 30 à 9999 tr/mn.
Description du fonctionnement :
Ce tachymètre a été conçu à l'origine pour mesurer la vitesse de rotation de moteurs électriques alimentés en continu ou en alternatif (mono ou triphasé). Le PIC 16F84 mesure la période de rotation du moteur. Il calcule ensuite sa vitesse de rotation puis l'affiche. L'avantage de ce système de mesure est que l'afficha est rafraîchi toutes les secondes, et ceci indépendamment de la vitesse de rotation.
Le capteur peut être de différentes technologies. Il doit fournir un signal logique 0/5V avec un rapport cyclique autour de 0.5 (valeur non critique à la précision de l'appareil). L'entrée capteur est protégée par un écrêteur ce qui évitera à certains imprudents de flamber le micro-controleur.
Lors de la mise sous tension, si aucune information ne provient du capteur, l'affichage reste vierge.
On peut tester le tachymètre sans le capteur en court-circuitant rapidement plusieurs fois les deux picots XE et X0.
Pour réaliser de projet vous aurez besoin :
schéma structurel du Tachymètre
typon du Tachymètre
schéma d'implantation des composants
programme du PIC 16F84
L'ensemble zippé intègre le programme en Basic Digimok, en assembleur et
Le fichier .hex nécessaire à la programmation du PIC.
Lors de la programmation, les fusibles seront configurés comme suit :
Power Up Timer ON / Watchdog OFF / Oscillator HS / Code protect OFF
Nomenclature :
Résistance
Condensateur
Circuit Intégré
Quartz
Diode
Transistor
Transformateur
Entretoise
Vis
Connecteur
Picot
R1 à R8
R9 à R12
R13
R14
R15
C1, C2
C3
C4
C5
C6 , C7
C8
U1 à U4
U5
U6
U7
Q1
D1, D2
D3
T1 à T4
TR1
M3 x 10mm
M3 x 5 mm
X5, XE, X0
XM
180
1.2k
220
100k
10k
12 pF Céramique
220 µF 16V
22 µF 16V
100 nF CMS 1206
100 µF 16V
1 µF
LTS 546 + 2 supports 24 broches DIL
ULN2803 + support 18 broches DIL
16F84 20MHz + support 18 broches DIL
7805 + Radiateur + vis - écrou
8.192 MHz
1N 4148
pont 1A
BC 327
9V - 1.5VA
3 pour fixation de la carte
3
Connecteur 3 broches pour capteur
Masse
La fabrication :
La fabrication ne pose pas de problèmes particuliers. Les afficheurs sont montés sur deux supports 24 broches DIL. On aura préalablement arraché les deux pattes de gauche du support de gauche (détail visible sur la photo). Il faudra donc faire attention lors de l'implantation des afficheurs sur les supports à ne pas créer un décalage.
Le PIC doit être obligatoirement une version 20 MHz.
Les afficheurs sept segments sont disponibles dans plusieurs marques : SA0511SRWA chez Kingbright ...
Ce sont des anodes communes dont le brochage est le suivant :
LE CAPTEUR
C'est une proposition de capteur infrarouge. L'axe du moteur est teinté moitié en noir, moitié en blanc. Il n'est pas besoin d'apporter de la précision dans la peinture. Le tachymètre n'effectue des mesures que sur au moins une rotation du moteur.
Description du fonctionnement :
La LED d'émission D2 émet un rayonnement en permanence. Ce rayonnement sera renvoyé ou non vers le capteur en fonction de la couleur de l'axe du moteur. La tension au bornes du capteur D1 est présentée sur l'entrée + du comparateur. Cette même tension est intégrée par la cellule R7-C2, ce qui fait que c'est la tension moyenne présente aux bornes du capteur qui est présentée sur la broche - du comparateur (polarisation automatique). Les deux tensions sont comparées (le composant R4 permet de réaliser l'hystérésis) et le signal rectangulaire de sortie du comparareur est présenté sur l'entrée d'un MAX 232. La sortie XS est donc présente sous la forme d'un signal rectangulaire d'amplitude +10V / -10V. Cette dernière opération permet d'éloigner le capteur de quelques mètres par rapport au tachymètre.
Pour réaliser de projet vous aurez besoin :
schéma structurel du Capteur
typon du Capteur
schéma d'implantation des composants
Nomenclature :
Résistance
Condensateur
Circuit Intégré
Diode
Picots
R1, R6, R7
R2
R3
R4
R5
C1, C2, C3
C4, C5, C6, C7
C8
U1
U2
D1
D2
X0, X5, XS
100k
10k
1k
1M
150
100 uF - 6,3V
4,7 µF - 16V
100 nF
LM 393 + support 8 broches DIL
MAX 232 + support 16 broches DIL
Réception Infrarouge
Émission Infrarouge
Masse, +5V, Sortie.
La fabrication :
Pas de problèmes particuliers. Il faut acheter un couple Émetteur / Récepteur IR cohérent. Suivant la technologie retenue deux emplacements sont proposés pour l'implantation du récepteur IR. Les deux pastilles libres visibles sur le plan d'implantation sont là pour ça. Une fois le capteur intégré dans un boîtier, il faudra le monter capteur distant d'environ 1cm de l'axe moteur.
Si le capteur est proche du tachymètre, on peut se passer du MAX et de ses 4 condensateurs. Le support du MAX 232 ne sera pas implanté et la broche 10 devient la sortie du capteur.
Un autre capteur :
Il utilise un capteur à fourche et il est moins délicat à mettre en oeuvre.
Un inconvénient, il émet un signal 0 / 5V, ce qui limite la distance de transmission avec le tachymètre.
Capteur à fourche